|
|
 |
| Kleinknecht Automotive GmbH has
integrated execution of Rapid Prototyping code into the
MCS400 calibration platforms as standard. Models to be
created in
MATLAB/Simulink
® and using the supplied
@Source blockset any of the available ECU variables and
parameters can be selected and connected to the strategy
developed in the model. |
| |
|
|
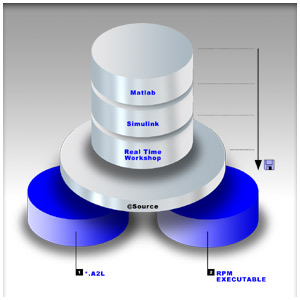
The Model can be built from
Simulink. By simply issuing the build command, a Rapid
Prototyping Module (RPM) will be generated. To the user,
an RPM just looks like an ECU. RPMs are fully self-contained
and freely distributable. Once deployed into the MCS400, an
RPM will always run from power-up.
The Strategy contained in the RPM will be executed by the
MCS400 and will interface with the target ECU(s) via CCP or
other high speed debug interfaces such as RENESAS' Advanced
User Debug protocols or the Infineon Tricore's ® specialty
peripheral units and/or OCDS.
|
| |
|
|
| |
| |
|
|
